
trackwhack
Senior Member
- Joined
- Jul 20, 2011
- Messages
- 3,757
- Likes
- 2,590
I decided to build a basic quadcopter sometime back with the following idea of scale.
1) Build a prototype with basic maneuverability (2 years)
2) Scale it up to carry bigger loads (Year 3)
3) Extend range and add First Person viewer controls so that I can send it out on missions") (Year 4)
(Year 4)
4) Use a scaled larger model for crop dusting on my farm using GPS co-ordinates and a pre- programmed path (Year 5)
I spent a few months reading up and brushing up on aero-modelling, propeller theory, etc and also procuring raw material for the build. I wanted to share my experiences with everyone for two purposes.
1) Help and advice
2) Keep me motivated. The fact that I put this thread up should put enough pressure on me to finish it
Some wiki gyan first
Quadcopter
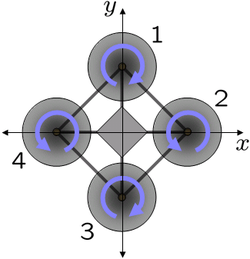
Schematic of reaction torques on each motor of a quadrotor aircraft, due to spinning rotors. Rotors 1 and 3 spin in one direction, while rotors 2 and 4 spin in the opposite direction, yielding opposing torques for control.
1) Build a prototype with basic maneuverability (2 years)
2) Scale it up to carry bigger loads (Year 3)
3) Extend range and add First Person viewer controls so that I can send it out on missions
(Year 4)4) Use a scaled larger model for crop dusting on my farm using GPS co-ordinates and a pre- programmed path (Year 5)
I spent a few months reading up and brushing up on aero-modelling, propeller theory, etc and also procuring raw material for the build. I wanted to share my experiences with everyone for two purposes.
1) Help and advice
2) Keep me motivated. The fact that I put this thread up should put enough pressure on me to finish it
Some wiki gyan first
Quadcopter
Schematic of reaction torques on each motor of a quadrotor aircraft, due to spinning rotors. Rotors 1 and 3 spin in one direction, while rotors 2 and 4 spin in the opposite direction, yielding opposing torques for control.
Last edited:









 . But will try this weekend when I continue work on it. Will surely post videos of first test run and getting it to fly(or crash
. But will try this weekend when I continue work on it. Will surely post videos of first test run and getting it to fly(or crash 